

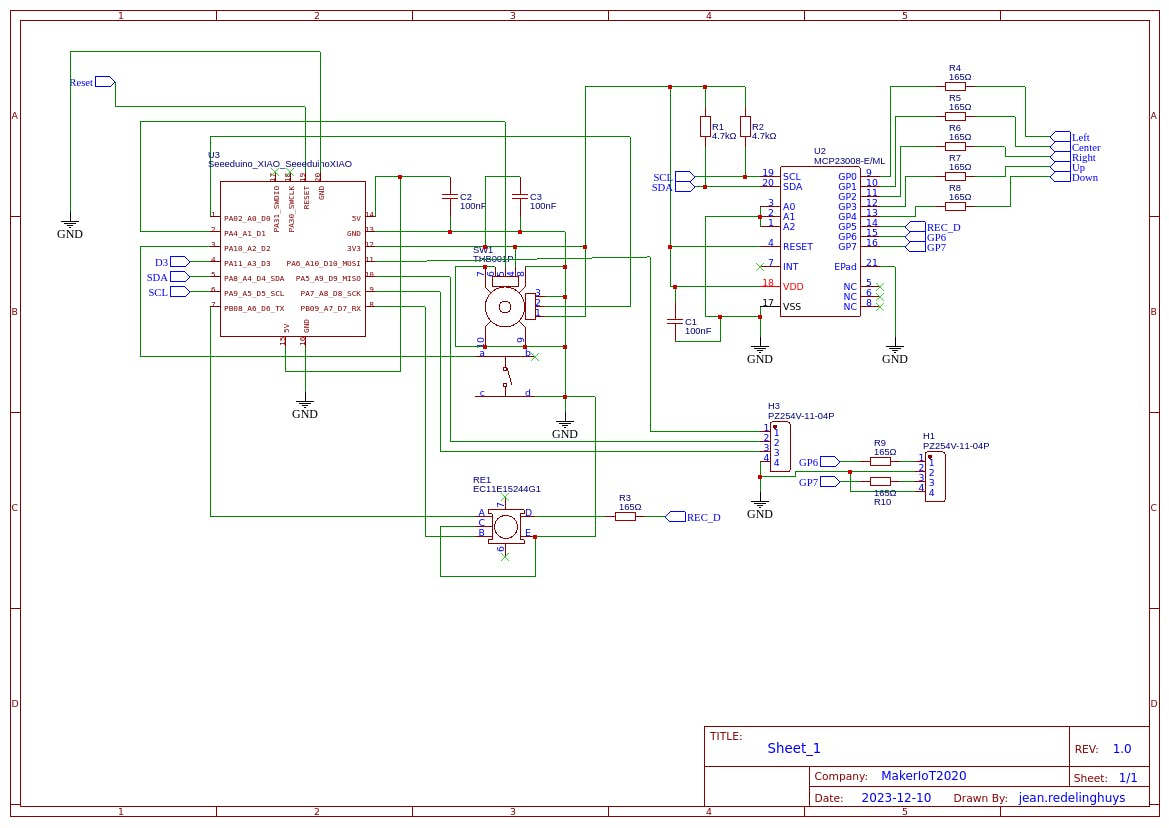
原理图

代码: 全选
import time
import board
import busio
from rainbowio import colorwheel
import neopixel
import rotaryio
import microcontroller
from digitalio import Direction
from adafruit_mcp230xx.mcp23008 import MCP23008
import digitalio
i2c = busio.I2C(board.SCL, board.SDA)
mcp = MCP23008(i2c)
from analogio import AnalogIn
import usb_hid
from adafruit_hid.mouse import Mouse
joyX = board.A0
joyY = board.A1
JoyBtn = board.D2
LeftBtn = 0
CenterBtn = 1
RightBtn = 2
UpBtn = 3
DownBtn = 4
EncoderBtn = 5
mouse = Mouse(usb_hid.devices)
xAxis = AnalogIn(joyX)
yAxis = AnalogIn(joyY)
# NEOPIXEL
pixel_pin = board.NEOPIXEL
num_pixels = 1
pixels = neopixel.NeoPixel(pixel_pin, num_pixels, brightness=0.1, auto_write=False)
leftbutton = mcp.get_pin(LeftBtn)
leftbutton.direction = digitalio.Direction.INPUT
leftbutton.pull = digitalio.Pull.UP
centerbutton = mcp.get_pin(CenterBtn)
centerbutton.direction = digitalio.Direction.INPUT
centerbutton.pull = digitalio.Pull.UP
maint_btn = digitalio.DigitalInOut(JoyBtn)
maint_btn.switch_to_input(pull=digitalio.Pull.UP)
rightbutton = mcp.get_pin(RightBtn)
rightbutton.direction = digitalio.Direction.INPUT
rightbutton.pull = digitalio.Pull.UP
enc_btn = mcp.get_pin(EncoderBtn)
enc_btn.direction = digitalio.Direction.INPUT
enc_btn.pull = digitalio.Pull.UP
scroll_up = mcp.get_pin(UpBtn)
scroll_up.direction = digitalio.Direction.INPUT
scroll_up.pull = digitalio.Pull.UP
scroll_down = mcp.get_pin(DownBtn)
scroll_down.direction = digitalio.Direction.INPUT
scroll_down.pull = digitalio.Pull.UP
mousewheel = rotaryio.IncrementalEncoder(board.D6, board.D7, 4)
last_position = mousewheel.position
print(mousewheel.position)
move_speed = 3
enc_down = 0
RED = (255, 0, 0)
YELLOW = (255, 150, 0)
GREEN = (0, 255, 0)
CYAN = (0, 255, 255)
BLUE = (0, 0, 255)
PURPLE = (180, 0, 255)
BLACK = (0, 0, 0)
if move_speed == 0:
in_min, in_max, out_min, out_max = (0, 65000, -20, 20)
filter_joystick_deadzone = (
lambda x: int((x - in_min) * (out_max - out_min) / (in_max - in_min) + out_min)
if abs(x - 32768) > 500
else 0
)
if move_speed == 1:
pixels.fill(GREEN)
pixels.show()
in_min, in_max, out_min, out_max = (0, 65000, -15, 15)
filter_joystick_deadzone = (
lambda x: int((x - in_min) * (out_max - out_min) / (in_max - in_min) + out_min)
if abs(x - 32768) > 500
else 0
)
if move_speed == 2:
pixels.fill(BLUE)
pixels.show()
in_min, in_max, out_min, out_max = (0, 65000, -10, 10)
filter_joystick_deadzone = (
lambda x: int((x - in_min) * (out_max - out_min) / (in_max - in_min) + out_min)
if abs(x - 32768) > 500
else 0
)
if move_speed == 3:
pixels.fill(PURPLE)
pixels.show()
in_min, in_max, out_min, out_max = (0, 65000, -8, 8)
filter_joystick_deadzone = (
lambda x: int((x - in_min) * (out_max - out_min) / (in_max - in_min) + out_min)
if abs(x - 32768) > 500
else 0
)
if move_speed == 4:
pixels.fill(CYAN)
pixels.show()
in_min, in_max, out_min, out_max = (0, 65000, -5, 5)
filter_joystick_deadzone = (
lambda x: int((x - in_min) * (out_max - out_min) / (in_max - in_min) + out_min)
if abs(x - 32768) > 500
else 0
)
pixels.fill(BLACK)
pixels.show()
while True:
# Set mouse accelleration ( speed)
#print(mousewheel.position)
if move_speed == 0:
pixels.fill(BLACK)
pixels.show()
in_min, in_max, out_min, out_max = (0, 65000, -20, 20)
filter_joystick_deadzone = (
lambda x: int(
(x - in_min) * (out_max - out_min) / (in_max - in_min) + out_min
)
if abs(x - 32768) > 500
else 0
)
if move_speed == 1:
pixels.fill(GREEN)
pixels.show()
in_min, in_max, out_min, out_max = (0, 65000, -15, 15)
filter_joystick_deadzone = (
lambda x: int(
(x - in_min) * (out_max - out_min) / (in_max - in_min) + out_min
)
if abs(x - 32768) > 500
else 0
)
if move_speed == 2:
pixels.fill(BLUE)
pixels.show()
in_min, in_max, out_min, out_max = (0, 65000, -10, 10)
filter_joystick_deadzone = (
lambda x: int(
(x - in_min) * (out_max - out_min) / (in_max - in_min) + out_min
)
if abs(x - 32768) > 500
else 0
)
if move_speed == 3:
pixels.fill(PURPLE)
pixels.show()
in_min, in_max, out_min, out_max = (0, 65000, -8, 8)
filter_joystick_deadzone = (
lambda x: int(
(x - in_min) * (out_max - out_min) / (in_max - in_min) + out_min
)
if abs(x - 32768) > 500
else 0
)
if move_speed == 4:
pixels.fill(CYAN)
pixels.show()
in_min, in_max, out_min, out_max = (0, 65000, -5, 5)
filter_joystick_deadzone = (
lambda x: int(
(x - in_min) * (out_max - out_min) / (in_max - in_min) + out_min
)
if abs(x - 32768) > 500
else 0
)
current_position = mousewheel.position
position_change = current_position - last_position
x_offset = filter_joystick_deadzone(xAxis.value) * -1 # Invert axis
y_offset = filter_joystick_deadzone(yAxis.value)
mouse.move(x_offset, y_offset, 0)
if enc_btn.value and enc_down == 1:
move_speed = move_speed + 1
if move_speed > 4:
move_speed = 0
# print (move_speed)
enc_down = 0
if not enc_btn.value:
enc_down = 1
if leftbutton.value:
mouse.release(Mouse.LEFT_BUTTON)
# pixels.fill(BLACK)
# pixels.show()
else:
mouse.press(Mouse.LEFT_BUTTON)
pixels.fill(GREEN)
pixels.show()
if centerbutton.value:
mouse.release(Mouse.MIDDLE_BUTTON)
else:
mouse.press(Mouse.MIDDLE_BUTTON)
pixels.fill(YELLOW)
pixels.show()
# Center button on joystick
if maint_btn.value:
mouse.release(Mouse.LEFT_BUTTON)
else:
mouse.press(Mouse.LEFT_BUTTON)
pixels.fill(GREEN)
pixels.show()
if rightbutton.value:
mouse.release(Mouse.RIGHT_BUTTON)
# pixels.fill(BLACK)
# pixels.show()
else:
mouse.press(Mouse.RIGHT_BUTTON)
pixels.fill(PURPLE)
pixels.show()
if not scroll_up.value:
mouse.move(wheel=1)
time.sleep(0.25)
pixels.fill(BLUE)
pixels.show()
if not scroll_down.value:
mouse.move(wheel=-1)
time.sleep(0.25)
pixels.fill(CYAN)
pixels.show()
if not scroll_up.value and not scroll_down.value:
for x in range(4):
pixels.fill(RED)
pixels.show()
time.sleep(0.5)
pixels.fill(BLACK)
pixels.show()
time.sleep(0.5)
microcontroller.reset()
if position_change > 0:
mouse.move(wheel=position_change)
#print(current_position)
#pixels.fill(BLUE)
#pixels.show()
elif position_change < 0:
mouse.move(wheel=position_change)
#print(current_position)
#pixels.fill(CYAN)
#pixels.show()
last_position = current_position
pixels.fill(BLACK)
pixels.show()